The overarching purpose of this project is to unite a fragmented field—research in prosthetic hardware design, prosthetic control, and amputee biomechanics is currently done in silos. Each researcher develops their own robotic leg system on which to test their control strategies or biomechanical hypotheses. This may be successful in the short term, since each researcher produces publications and furthers knowledge. However, in the long term, this fragmented research approach hinders results from impacting the lives of individuals with disabilities—culminating in an overarching failure of the field to truly have the impact that motivated it.

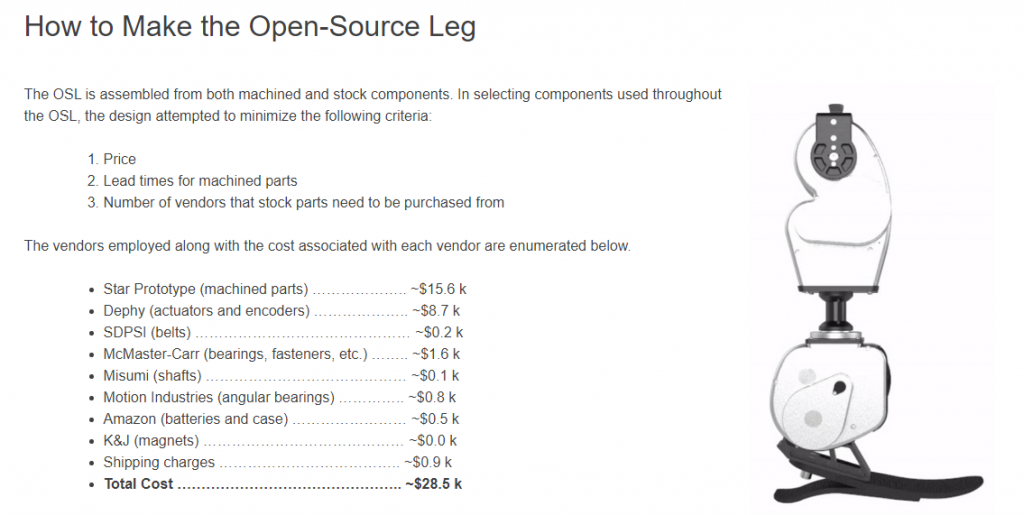
How to Make the Open-Source Leg
https://opensourceleg.com https://twitter.com/hashtag/opensourceleg
